


BİR FAZLI ASENKRON MOTORLARIN ÇEŞİTLERİ, YAPISI VE
ÇALIŞMA PRENSİBİ
ÇALIŞMA PRENSİBİ
Genellikle üç fazlı alternatif akımın bulunmadığı yerlerde veya
küçük güçlü olduklarından işyerlerinde bir fazlı kolon hattına
bağlanırlar Bir fazlı asenkron motorlar, küçük iş tezgahları ile
buzdolabı, çamaşır makinası, küçük su pompalan, mikser, vantilatör,
aspiratör, teyp, pi¬kap, traş makinası, vb. yerlerde kullanılır.
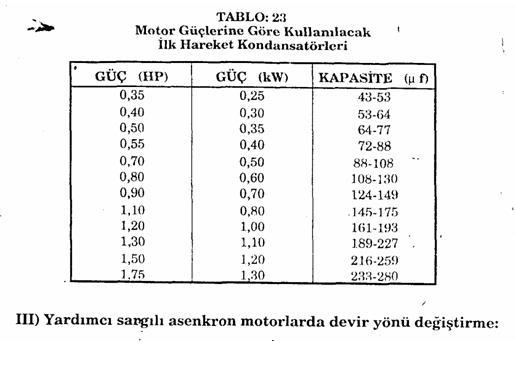
Kalkınma akımları fazla ol¬duğundan çoğunlukla 1/8, 1/6, 1/4, 1/2, l,
1/5 ve 2 HP gibi küçük güçlerde imal edilir.
BİR FAZLI MOTORUN ÇEŞİTLERİ:
a) Yardımcı Sargılı Asenkron motorlar
I) Direnç yolvermeli
II) Kondansatör yolvermeli
1- Tek kondansatörlü
2- Çift kondansatörlü III) Daimi kondansatörlü
b) Üniversal (Seri) motorlar
c) Yardımcı kutuplu (Gölge kutuplu) asenkron motorlar
d) Repülsiyon motorlar
e) Relüktans motorlar
f) Küçük senkron motorlar
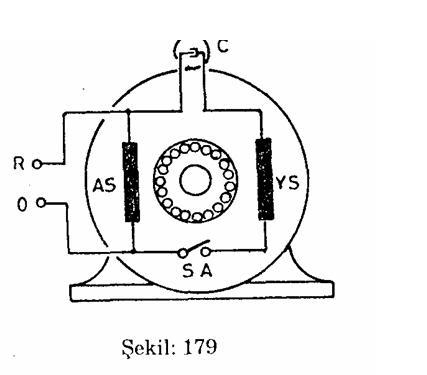
a) Yardımcı sargılı bir fazlı asenkron motorların yapısı ve çalınma prensibi:
I) Yapısı:
Bir fazlı 3'ardımcı sargılı asenkron motorlar; a) Stator, b) Rotor,
c) Gövde ve Kapaklar, d) Santrifüj Anahtar olmak üzere dört kısımdan oluşur.
a)Stator: Üç fazlı asenkron motorlarda olduğu gibi bir fazlı
motorlarda da stator ince silisli sacların iç yüzlerine presle oyuklar
açılıp paketlenmesiyle meydana gelmiştir. Oyuklar içerisine, hem
birbirine karşı hem de statora karşı yalıtılmış Ana Sargı ve Yardımcı
Sargı sarılır. Motorun çalışmaya başladığı ilk anda ana ve yardımcı
sargı devreye sokulur. Motor normal devrinin % 75'ine ulaştığında
yardımcı sargı, santrifüj anahtar aracılığı ile devreden çıkartılır.
Daha sonra motor ana sargı ile çalışmasına devam eder.
b) Rotor: Silisli sacların dış yüzüne presle oyuklar açılmış ve
birleştirilerek sac paket oluşturulmuştur. Rotor oyuklarına, iki
ucundan kısa devre edilmiş alüminyum rotor çubukları enjeksiyon yöntemi
ile yerleştirilip daha sonra bu sac paket, bir mü üzerine sıkıca
takılarak rotor meydana getirilmiştir.
c) Gövde ve Kapaklar: Küçük ev aletlerinde kullanılan motorlarda
gövde düz yüzeyli olarak, orta güçlü motorlarda ise gövde çıkıntılı
yüzeyli olarak yapılır. Genellikle gövdeye saplamalarla tespit edilen
kapakların içerisine açılan yataklara rotor mili üzerine geçirilmiş
rulmanlar yerleştirilir.
d) Santrifüj Anahtar: Motorun ilk kalkınma anında normal devrinin %
75'ine ulaşınca yardımcı sargıyı devreden çıkartan santrifüj anahtar,
motorun içerisine yerleştirilir.
İki kısımdan meydana gelen santrifüj anahtarın duran kısmı kapak
içerisine, hareketli kısmı ise rotor miline monte edilir. Duran kısımda
bulunan iki kontak, motor çalışmazken kapalı durumdadır ve yardımcı
sargıyı devreye sokar. Motor normal devrinin u'ine ulaştığında ise
hareketli kısım, merkezkaç kuvvetin etkisi ile dışarı doğru çekilerek
kontak üzerindeki basıncı kaldırır. Bu ise bir yay vasıtası ile tekrar
eski konumuna gelerek kontağı kapatır. Bu sırada kontak açılarak
yardımcı sargı devreden çıkar. Motor durduğunda ise bir yay vasıtası
ile tekrar eski konumuna gelerek kontağı kapatır.

II) Çalışma Prensibi:
Üç fazlı asenkron motorlarda faz sargıları, .aralarında 120°
elektriki açı farkı olacak şekilde statora yerleştirildiğinden döner
manyetik alan meydana geliyordu. Fakat bir fazlı asenkron motorlarda
yalnız bir sargı ile döner manyetik alan elde edilemez. Bu nedenle bir
fazlı motorlarda ana sargının dışında bir de yardımcı sargı bulunur.
Ana ve yardımcı sargılar birbirine paralel bağlanıp aralarında 90°
elektriki açı farklı oyuklara yerleştirilir. Bu sargıları bir fazlı
gerilim uygulandığında, ana ve yardımcı sargıda manyetik alanlar
meydana gelir. Oyuklar arasında 90° elektiriki açı farkı olmasına
rağmen, sargılara uygulanan gerilimler aynı fazlı olduğundan meydana
gelen manyetik alanlarda aynı fazlıdır. Bu nedenle iki sargıda manyetik
döner alan meydana gelmez.
İki sargıda meydana gelen manyetik alanlar arasında faz farkının
oluşması için sargılardan geçen akımlarında faz farklı olması sağlanır.
Bunun için de:
a) Devamlı olarak devrede kalan ana sargı kalın kesitli telle çok
sipirli olarak sarılır. Ana sargıya paralel bağlanan yardımcı sargı ise
ince kesitli telle az sipirli sarılır. Bu uygulamada yardımcı sargı
sipir sayısı ana sargıya göre % 25, iletken kesiti ise 1/3 veya 1/4
oranında daha küçüktür. Böylece ana sargının omik direncinin küçük,
endüktif reaktansının büyük olması ve akımın gerilimden 90°'ye yakın
geri kalması sağlanır. Ayrıca ana sargı alta, yardımcı sargı üste
yerleştirilerek endüktif reaktansın daha da büyümesi sağlanır.
b) Yardımcı sargıdan geçen akımın gerilimden ilerde olması için
yardımcı sargıya seri olarak bir kondansatör bağlanır. Böylece ana ve
yardımcı sargı akımları arasında 90°'lik faz farkı meydana gelir. Bu da
düzgün bir döner manyetik alanın meydana gelmesini sağlar.Sincap
kafesli rotorun kısadevre edilmiş rotor çubukları, stator manyetik
alanı tarafından kesilerek çubuklarda emk endüklenir. Rotor çubukları
iki tarafından kısadevre edildiğinden içerisinden kısadevre akımları
geçer ve rotorda bir manyetik alan oluşur.
Stator döner manyetik alam, rotor manyetik alanını peşinden
sürüklemesi sonucunda da rotor döner.Motorun ilk kalkınması anında
yardımcı sargı, ana sargının manyetik Motorun ilk kalkınması anında
yardımcı sargı, ana sargının manyetik alanını destekleyecek yöndedir.
Fakat rotor devri, normal devrine yaklaştıkça bu kez yardımcı sargı,
hem ana sargı hem de rotor sargısı üzerinde ters etki yapar. Motorun
normal çalışmasını engellemesi nedeni ile yardımcı sargı, santrifüj
anahtarla devreden çıkartılır. Eğer motor normal devrine ulaştığı halde
yardımcı sargı devreden çıkartılmazsa, ince kesitli yardımcı sargıdan
fazla akım geçeceğinden sargılar ısınır ve bir süre sonra da yanar.
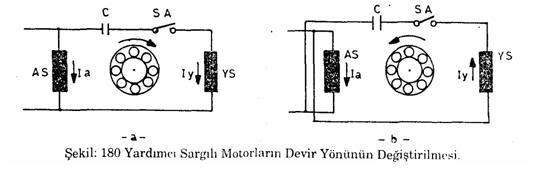
Yardımcı sargılı asenkron motorlarda devir yönünü değiştirmek için,
bobinlerden birinin akım yönünü değiştirmek gerekir. Bu değiştirme,
daha çok yardımcı sargıda uygulanır. Eğer U-W ve X-Z şeklinde
bağlanırsa motor bir yönde, U-Z ve X-W şeklinde bağlanırsa motor aksi
yönde döner.
Aspiratör, vantilatör, kompresör, çamaşır makinası gibi motorlar,
daima bir yönde dönerler. Bu, nedenle sargı uçları stator içinde
bağlanarak dışarıya üç uç çıkartılır. Uçlardan ikisi ana sargı, diğeri
ise yardımcı sargı ucudur ve bu uç santrifüj anahtara bağlanır. Devir
yönü sık sık değiştirilen motorlarda ise klemens tablosuna dört uç
çıkartılır.
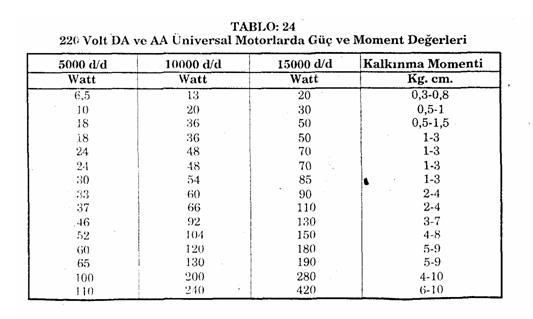
b) Üniversal (Seri) Motorların Yapısı ve Çalışma Prensibi:
Üniversal motorlar, statoru çıkıntılı kutuplu yapılarak kutup
sargılan sarılması ve rotorunda aynen endüvide olduğu gibi sargıların
bulunması nedeniyle doğru akım seri motorlarına benzer.
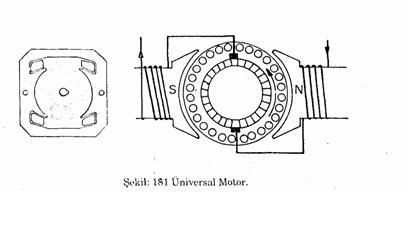
prensip şeması görülen üniversal motora bir fazlı alternatif gerilim
uygulandığında, kutup ve endüvi sargılarından alternatif akım geçer.
Geçen bu A.A., kutup sargılarında manyetik alan meydana getirir.
Kutuplarda meydana gelen alan içerisinde bulunan endüvi iletkenlerinin
içerisinden akım geçince, "İçerisinden akım geçen bir iletken, manyetik
alan içerisine sokulduğunda alanın dışına doğru itilir" prensibine göre
iletkenler kutupların dışına itilir. Bu sırada iki ucundan yataklanan
endüvi döner.
Üniversal motorların diğer motorlardan farkı devirleridir. Boştaki
devir sayıları 11000 - 15000 - 18000 - 20000 Dev./Dak. gibi oldukça
yüksektir. Bunun yanısıra;
a) Motorun yük akımı arttıkça, kutup ve endüvi sargılarında düşen gerilimlerin artması, devir sayısının düşmesine sebep olur.
b) Motorun yük akımı arttıkça, endüvi reaksiyonunun hava
aralığındaki manyetik akıyı azaltması nedeniyle devir sayısının
yükselmesine sebep olur.
c) Motor yük akımı arttıkça, kutup ve endüvi sargılarındaki reaktif
gerilim düşümü endüviye uygulanan gerilimi azalttığından, devir
sayısının düşmesine sebep olur.
Devir sayılarının yüksek olması nedeniyle üniversal motorlar, daha
çok elektrik süpürgelerinde, mikserlerde, kahve değirmenlerinde, dikiş
makinaları, saç kurutma makinaları ve traş makinalarında kullanılır.
Bunun dışında devir sayıları, motora uygulanan gerilimi değiştirerek
ayarlanır. Ayrıca, üniversal motorlann kutup veya endüvi sargısında
birisinin uçları değiştirildiğinde o sargıdan geçen akımın yönü
değişir. Böylece manyetik alanın yönü değişeceğinden, motor devir yönü
değiş mis olur (Şekil: 182).

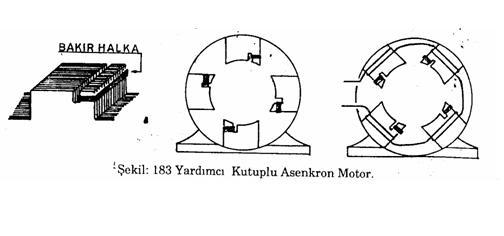
c) Yardımcı Kutuplu (Gölge Kutuplu) Asenkron Motorların Yapısı ve Çalışma Prensibi:
Daha çok küçük güçlü olarak yapılan ve sessiz çalışmaları nedeniyle
tercih edilen bu motorların yapımları kolay ve ucuzdur. D. A.
makinalarındaki gibi kutup ayakları vardır ve kutbun bir ucundan 1/3
uzaklıkta bulunan yarık içerisine uçları kısadevre edilen bakır halka
geçirilmiştir. Kutbun diğer 2/3'lük kısmına ise kutup sargısı
sarılmıştır (Şekil: 183).
Üç fazlı motorlardaki gibi döner alan prensibine göre çalışan bu
motorlarda döner alan statorun çevresinde dönmeyip, kutupların bir
ucundan diğer ucuna doğru kayar. Bu nedenle bu tip motorlarda moment,
her an değişir.
Kutup ayaklan üzerinde açılan ve yarıkla ayrılan kısma yerleştirilen
bakır halkaya, Yardımcı Kutup veya Gölge Kutup denir. Kutup
sargılarının bir fazlı A.A. ile beslendiği bu motorlarda rotor, aynen
üç fazlı asenkron motorlarda olduğu gibi sincap kafeslidir.
Kutup sargılarına bir fazlı A.A. uygulandığında bobinden geçen
sinüsoidal akım, sıfırdan maksimum değere doğru arttıkça değişken bir
manyetik akı meydana getirir. Bu değişkin manyetik alan içerisinde
kalan bakır halka üzerinde bir gerilim endüklenir ve kısadevre
edildiğinden, üzerinden kısadevre akımı geçer. Lenz Kanununa göre;
kısadevre akımı, kendisini meydana getiren manyetik alanın yönüne zıt
yönde bir manyetik alan meydana getirir. Dolayısıyla yardımcı kutup
üzerinde alan zayıflaması olur ve kutup sargısının meydana getirdiği
alan, yardımcı kutba doğru kayar. A.A. yön değiştirdiğinde bu kez
kutupların ismi değişir (N iken S olur) ve yine alanın kayma yönü aynı
kalır.
• Yukarıda anlatıldığı gibi bir fazlı yardımcı kutuplu motorlarda
manyetik alan, ana kutuptan yardımcı kutba doğru devamlı olarak kayma
gösterir. Döner alana benzeyen bu manyetik alan, rotorun dönmesini
sağlar.
Bir fazlı yardımcı kutuplu asenkron motorlar daima aynı yönde
dönerler. Devir yönünü değiştirmek için rotor, stator içerisinde ters
çevrilir.
Bu motorlarda devir sayısı ayarı, motora uygulanan gerilim bazı yöntemlerle değiştirilerek yapılır.
Yardımcı kutuplu motorların olumlu yönleri:
1- Yapıları basittir,
2- Maliyetleri ucuzdur,
3- Çok sessiz çalışırlar.
Yardımcı kutuplu motorların olumsuz yönleri:
1- Kalkınma momentleri düşüktür,
2- Verimleri düşüktür,
3- Aşırı yüklerde dururlar.
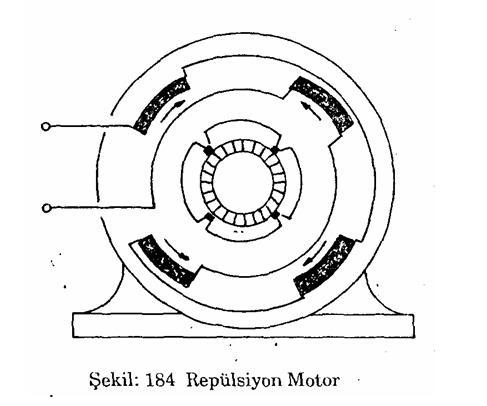
d) Repülsiyon Motorların Yapısı ve Çalışma Prensibi:
Bu motorların statorları, yalnızca ana sargısı bulunan bir fazlı
asenkron motorun statoruna benzer. Sargılar, el tipi olarak
sarılmıştır. Rotorları ise doğru akım makinasının endüvisi gibi olup
sargı uçları kollektör dilimlerine irtibatlandırılmıştır.
Repülsiyon motorlarda da, bir fazlı asenkron motorlarda olduğu gibi
kapaklar, yataklar, merkezkaç düzeneği bulunur. Bu motorlarda bir de
fırça düzeneği vardır. Fırçalar kapak üzerine monte edilmişse D. A
makinasının endüvisi gibi kollektöre üstten basar. Eğer fırçalar mil
üzerine monte edilmişse fırçalar kollektöre alın kısmından basar.
Repülsiyon motorların stator sargılarına alternatif gerilim
uygulandığında sargılarda, yönü ve şiddeti her an değişen bir manyetik
alan meydana gelir. Bu değişken alanın içerisinde kalan endüvi
sargılarında ise bir gerilim indüklenir.
Repülsiyon motorların fırçaları kısa devre edilmiştir. Bu nedenle
endüvi sargılarından kısa devre akımları geçerek manyetik alan
oluşturur .Eğer fırçalar kutup eksenine konulmuşsa sargıların
yarısından bir yönde, diğer yarısından ters yönde alcım geçer.
Dolayısıyla meydana gelen toplam manyetik alan sıfır olduğundan gerilim
indüklenmez ve fırçalardan akım geçmez. Bu nedenle rotor dönmez.
Fırçalan kutup ekseninin bir tarafına doğru a açısı kadar
kaydırdığımızda sargılardan ve fırçalardan akım geçişi olur. Böylece
rotor üzerinde oluşan manyetik alan kutupları ile stator manyetik alan
kutuplarının birbirini itmesi ve çekmesi nedeniyle döndürme momenti
meydana gelir ve rotor döner.
Repülsiyon motorlarda fırçalar sağa doğru kaydırılırsa motor sağa, fırça sola kaydırılırsa motor sola doğru döner.
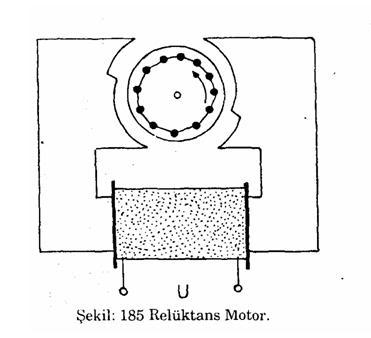
e) Relüktans motorların yapısı ve çalışma prensibi
Relüktans motorlar, gölge kutuplu motorlara benzerler. Ancak, bakır
halka yerine şekil: 185'de görüldüğü gibi kutup ayaklarının bir
kısmındaki hava boşluğu artırılmıştır. Böylece hava aralığının fazla
olduğu kısımda manyetik akının geçişine gösterilen direnç büyük, hava
aralığının az olduğu kısımda manyetik akının geçişine gösterilen direnç
küçüktür. İşte bu tip motorlara, manyetik direnç anlamına geldiği için
Relüktans motor denilir.
Gösterilen büyük değerdeki manyetik direnç (Relüktans) nedeniyle
manyetik akı geçişi, küçük manyetik direnç (Relüktans) gösterilen hava
aralığının az olduğu kısımda yoğunlaşır. Yani kutup yüzeyinde bir
taraftan diğer tarafa doğru alan kayması meydana gelir. Kayan bu alan,
kısadevre çubuklu rotoru da etkileyerek dönmesini sağlar. Rotorun dönüş
yönü, büyük hava aralığı olan kısımdan küçük hava aralığı olan kısma
doğrudur.
Bu motorlarda devir sayısı, uygulanan gerilim değeri değiştirilerek
ayarlanır. Devir yönü ise sabittir. Ancak rotor, statora ters takılarak
değiştirilebilir.
Küçük ebatlı yapılan bu motorların kalkınma momentleri küçük olduğundan kullanım alanları azdır.
f) Küçük Senkron Motorların Yapısı Ve Çalışma Prensibi:
Küçük senkron motorlar, isminden de anlaşılacağı gibi çok küçük güçlerde ve iki tipte yapılırlar:
1- Histerezis senkron motorlar.
2- Relüktans senkron motorlar.
Histerezis senkron motorların statoru, yardımcı kutuplu motorların
statoru gibidir ve kutuplara bakır halkalar yerleştirilmiştir. Rotor
ise histerezis kaybının büyük olması için disk seklindeki çelik
saclardan yapılmıştır.
Stator bobinine alternatif gerilim uyguladığında bakır halkalardan
dolayı rotor dönmeye başlar. Bu sırada stator bobininde meydana gelen
manyetik alan, rotordan manyetik akılar geçirdiğinden rotorda, büyük
histerezis kaybından dolay) N - S kutuplan meydana getirir. Böylece
rotor, senkron hızla döner.

Relüktans senkron motorlarda stator çok kutuplu olarak demir saçtan,
rotor ise daimi mıknatıstan çıkıntılı kutuplu olarak yapılmıştır.
Stator bobinine alternatif gerilim uygulandığında meydana gelen
manyetik alandan dolayı kutuplaşma olur. Rotorun daimi mıknatıslı
olması ve rotor ile stator arasındaki değişik hava aralığı nedeni ile
döndürme momenti meydana gelir ve rotor, senkron hızla döner.
Küçük senkron motorlar, 3 ile 10 W güçlerinde yapılırlar. Devir
sayıları sabit olduğundan Zaman rölelerinde, zaman saatlerinde ve
otomatik kumanda sistemlerinde kullanılır.
ALINTIDIR.



